강체를 표현할 때 방향과 위치를 한번에 표현하는 방법으로는 Homogeneous Transformation Matrices : T를 사용한다

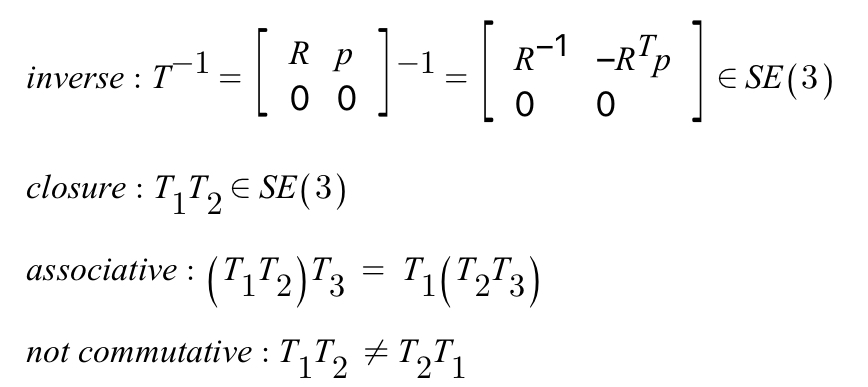
변환 행렬은 다음과 같은 성질을 가짐
사용 방법 -> 위치와 방향 표현, reference frame 변경, 틀의 벡터 대체
위치와 방향 표현 (1)
{s}에 대한 {b}의 위상 표현 T_sb
inverse 하면 반대로 표현 가능


reference frame 변경 (2)
T_ab와 T_bc의 곱으로 T_ac 표현 가능 -> reference frame 변경

틀의 벡터 대체 (3)